安裝前準備
-
在樹莓派上拓展文件系統
如果你使用的樹莓派為新裝的系統,那麼第一件事情就是擴展文件系統,以包括microSD卡上的所有空間。
具體步驟如下:
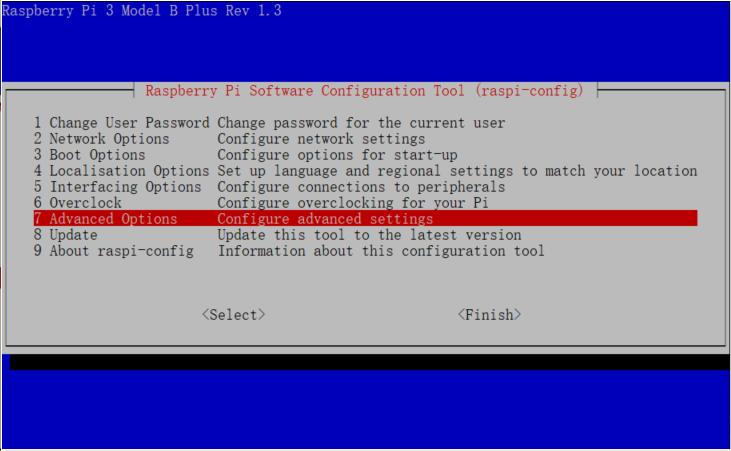
1.在樹莓派終端(或者SSH)上輸入:
1 $ sudo raspi-config
2.然後選擇“高級選項”菜單項
3.然後選擇“擴展文件系統”:
4. 選擇第一個選項“A1.Expand Filesystem”,按鍵盤上的Enter鍵,完成後點擊“Finish”按鈕,重新啟動樹莓派。
如果不能重啟,則可以執行以下操作:
1 $ sudo reboot
重新啟動后,文件系統已經擴展為包括micro-SD卡上的所有空間。可以通過執行 df -h 檢查輸出來驗證磁盤是否已擴展。
1 $ df -h
5. 此時我的樹莓派文件系統已擴展為包含16GB的micor-SD卡。如果您使用的是8GB卡,則可能使用了將近50%的可用空間,
因此,一件簡單的事情就是刪除LibreOffice和Wolfram引擎以釋放Pi上的一些空間:
1 $ sudo apt-get purge wolfram-engine 2 $ sudo apt-get purge libreoffice* 3 $ sudo apt-get clean 4 $ sudo apt-get autoremove
2.更換樹莓派源為清華鏡像源,防止後面下載GTK2.0失敗。
換源方法參考:
安裝步驟
1.更新系統
1 $ sudo apt-get update && sudo apt-get upgrade
2.在樹莓派上安裝OpenCV所需要依賴的工具和一些圖像視頻庫
-
安裝包括CMake的開發人員工具
1 // 安裝build-essential、cmake、git和pkg-config 2 sudo apt-get install build-essential cmake git pkg-config
-
安裝常用圖像工具包
1 // 安裝jpeg格式圖像工具包 2 sudo apt-get install libjpeg8-dev
1 // 安裝tif格式圖像工具包 2 sudo apt-get install libtiff5-dev
1 // 安裝JPEG-2000圖像工具包 2 sudo apt-get install libjasper-dev
1 // 安裝png圖像工具包 2 sudo apt-get install libpng12-dev
-
安裝常用的視頻庫
1 //v4l中4後面的是 英文字母“l” 2 sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
-
安裝GTK2.0
1 sudo apt-get install libgtk2.0-dev
-
安裝OpenCV數值優化函數包
1 sudo apt-get install libatlas-base-dev gfortran
3.下載編譯OpenCV源碼
-
下載opencv3.4.3和opencv_contrib3.4.3
1 // 下載OpenCV 2 wget -O opencv-3.4.3.zip https://github.com/Itseez/opencv/archive/3.4.3.zip
1 // 解壓OpenCV 2 unzip opencv-3.4.3.zip
1 // 下載OpenCV_contrib庫: 2 wget -O opencv_contrib-3.4.3.zip https://github.com/Itseez/opencv_contrib/archive/3.4.3.zip
1 // 解壓OpenCV_contrib庫: 2 unzip opencv_contrib-3.4.3.zip
-
配置CMake編譯OpenCV 3環境
使用CMake設置編譯,然後運行 make 來編譯OpenCV。這是整個過程中耗時最長的步驟,大約4個小時。
回到OpenCV存儲庫並創建 build 文件夾,用來存放 CMake 編譯時產生的臨時文件。
1 //具體路徑請以實際為準 2 cd ~/opencv-3.4.3 3 4 // 新建build文件夾 5 mkdir build 6 7 // 進入build文件夾 8 cd build 9
-
設置CMake編譯參數,安裝目錄默認為/usr/local
注意參數名、等號和參數值之間不能有空格,每行末尾“\”之前有空格,這裏使用換行符“\”是為了看起來工整,參數值最後是兩個英文的點,意思是上級
目錄(【注意】如果在root用戶下執行cmake命令,請將OPENCV_EXTRA_MODULES_PATH的值改為絕對路徑,如:/home/pi/opencv_contrib-3.4.3/modules):
/** CMAKE_BUILD_TYPE是編譯方式 * CMAKE_INSTALL_PREFIX是安裝目錄 * OPENCV_EXTRA_MODULES_PATH是加載額外模塊 * INSTALL_PYTHON_EXAMPLES是安裝官方python例程 * BUILD_EXAMPLES是編譯例程(這兩個可以不加,不加編譯稍微快一點點,想要C語言的例程的話,在最後一行前加參數INSTALL_C_EXAMPLES=ON,要C++例程的話在最後一行前加參數INSTALL_C_EXAMPLES=ONINSTALL_CXX_EXAMPLES=ON) **/ sudo cmake -D CMAKE_BUILD_TYPE=RELEASE \ -D CMAKE_INSTALL_PREFIX=/usr/local \ -D OPENCV_EXTRA_MODULES_PATH=~/opencv_contrib-3.4.3/modules \ -D INSTALL_PYTHON_EXAMPLES=ON \ -D INSTALL_CXX_EXAMPLES=ON \ -D BUILD_EXAMPLES=ON ..
配置完后如下圖:
-
備份build文件中的東西
因為下一步的編譯會使用build文件中的東西,假如編譯失敗后還要重新進行cmake,比較耽誤時間,這裏可以直接備份一下cmake好的build文件夾,
命名為build1,重新make的時候可以拿來用。
1 //返回上層目錄 2 cd .. 3 //備份release文件夾 4 cp -r release ./release1
-
為樹莓派增加SWAP
在開始編譯之前,建議你增加交換空間。這將使你使用樹莓派的所有四個內核來編譯OpenCV,而不會由於內存耗盡導致編譯掛起。
打開 / etc / dphys – swapfile 文件:
1 $ sudo nano /etc/dphys-swapfile
然後編輯 CONF_SWAPSIZE 變量:
注意:此處我將交換空間從100MB增加到2048MB;如果你不執行此步驟,你的樹莓派編譯時很可能掛起。
重新啟動交換服務:
1 $ sudo /etc/init.d/dphys-swapfile stop 2 $ sudo /etc/init.d/dphys-swapfile start
注意:增加交換空間的大小是燒壞樹莓派 microSD卡的好方法。基於閃存的存儲只能執行有限數量的寫操作,直到該卡基本不能夠容納1和0。我們只能在短時間內
啟動大型交換,所以這沒什麼大問題的。
-
編譯OpenCV 3
1 /** 2 * 以管理員身份,否則容易出錯 3 * make命令參數-j4指允許make使用最多4個線程進行編譯,這樣編譯速度會更快 4 * 可以根據自己機器的情況進行更改 5 * 使用tee命令可以將編譯過程中終端显示的信息保存到make.log文件中,便於查看,這樣即使VNC斷線,終端的* 信息太多看不到,也可以通過make.log文件查看編譯過程。 6 **/ 7 8 sudo make -j4 2>&1 | tee make.log
如果看到進度編譯到100%,那麼說明編譯安裝成功。
1 // 安裝 2 sudo make install 3 4 // 更新動態鏈接庫 5 sudo ldconfig
注意: 不要忘記回到 /etc/dphys–swapfile 文件:
1.將 CONF_SWAPSIZE 重置為 100MB
2.重新啟動交換服務
其他配置
設置庫的路徑,相當於windows下的環境變量,便於使用OpenCV庫,也可以不進行設置,使用的時候說明路徑也可。例如在編譯時說明使用庫的路徑是 -L/usr/local/lib
1.配置opencv.conf
打開opencv.conf配置文件,在末端加入如下內容:
1 //這裏我使用的是樹莓派默認的nano,也可以使用vim、gedit.打開opencv.conf文件 2 sudo nano /etc/ld.so.conf.d/opencv.conf 3 4 /** 5 *在末端添加如下內容 6 *注意:?表示一個空格,可能原因是有的語言要求最後有一個空格才可以編譯通過。 7 **/ 8 /usr/local/lib 9 ? 10 11 //加載一下 12sudo ldconfig
2.打開 bash.bashrc 配置文件
1 //打開bash.bashrc配置文件 2 sudo gedit /etc/bash.bashrc 3 4 5 // 在最後添加如下內容 6 PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig 7 export PKG_CONFIG_PATH
3.重啟樹莓派
1 sudo reboot
檢測OpenCV使用是否正常
python程序
1 import cv2 2 import numpy as np 3 cv2.namedWindow("gray") 4 img = np.zeros((512,512),np.uint8)#生成一張空的灰度圖像 5 cv2.line(img,(0,0),(511,511),255,5)#繪製一條白色直線 6 cv2.imshow("gray",img)#显示圖像 7 #循環等待,按q鍵退出 8 while True: 9 key=cv2.waitKey(1) 10 if key==ord("q"): 11 break 12 cv2.destoryWindow("gray")
保存文件為 test.py ,並在終端運行程序
1 sudo python3 test.py
運行結果如下:
本站聲明:網站內容來源於博客園,如有侵權,請聯繫我們,我們將及時處理【其他文章推薦】
※為什麼 USB CONNECTOR 是電子產業重要的元件?
※網頁設計一頭霧水??該從何著手呢? 找到專業技術的網頁設計公司,幫您輕鬆架站!
※想要讓你的商品成為最夯、最多人討論的話題?網頁設計公司讓你強力曝光
※想知道最厲害的台北網頁設計公司推薦、台中網頁設計公司推薦專業設計師”嚨底家”!!